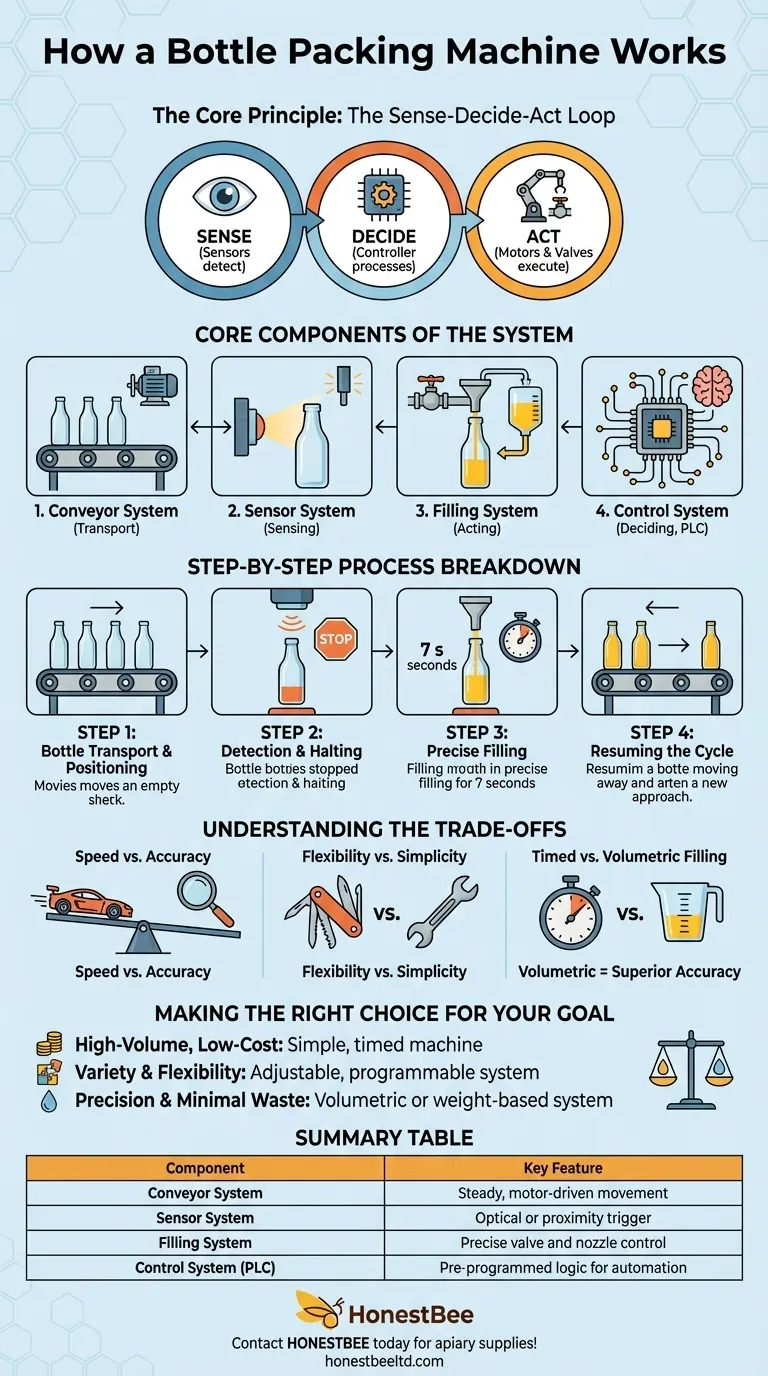
ボトル充填機の核心は、単純な自動化されたシーケンスで動作します。コンベヤーがボトルを所定の位置に移動させ、センサーがそれを検出し、コンベヤーが停止し、バルブが正確な量の製品を分配し、その後コンベヤーが次のボトルを所定の位置に移動させます。このサイクルが継続的に繰り返され、効率的で自動化された充填が実現されます。
基本的な動作原理は、単なる機械的なプロセスではなく、制御ループです。機械は常にセンサーを使用してラインの状態を感知 (Sense) し、コントローラーで次のアクションを決定 (Decide) し、モーターやバルブでその決定に作動 (Act) します。
システムの主要コンポーネント
原理を理解するためには、まずこの自動化プロセスに関わる主要な要素を理解する必要があります。各コンポーネントは、機械の動作において明確かつ重要な役割を果たします。
コンベヤーシステム(搬送)
これは機械の背骨です。モーターによって駆動されるコンベヤーベルトは、ボトルをステーションから次のステーションへと一定かつ安定した移動を提供します。
センサーシステム(センシング)
センサーは運用の「目」です。充填ステーションには、ボトルがノズルの真下に正しく配置されたことを検出するための光学センサーまたは近接センサーが配置されます。この検出が、充填シーケンス全体のトリガーとなります。
充填システム(作動)
このシステムは、製品リザーバー、バルブ、ノズルで構成されています。制御システムによってトリガーされると、バルブが開き、製品がノズルを通ってボトル内に流れ込むようになります。このバルブの精度は、一貫した充填のために極めて重要です。
制御システム(決定)
これは機械の「頭脳」であり、多くの場合プログラマブルロジックコントローラー(PLC)です。センサーから信号を受け取り、「モーターを停止する」や「バルブを7秒間開く」といった、事前にプログラムされた一連のコマンドを実行します。

プロセスの段階的な内訳
主要コンポーネント間の相互作用が、信頼性が高く反復可能なサイクルを生み出します。全体の動作は、いくつかの明確なステップに分解できます。
ステップ 1: ボトルの搬送と位置決め
サイクルは、モーターがコンベヤーベルトを駆動することから始まります。空のボトルがラインに供給され、充填ステーションに向かって移動します。
ステップ 2: 検出と停止
ボトルが充填ステーションに到着すると、センサーの前を通過します。センサーは制御システムに信号を送り、制御システムは直ちにコンベヤーモーターに停止を命じます。これにより、ボトルが充填ノズルの下に完全に整列することが保証されます。
ステップ 3: 正確な充填
ボトルが静止すると、制御システムは充填バルブの開口を命じます。バルブは所定の時間(例:7秒間)開いたままで、特定の量の製品を分配します。
ステップ 4: サイクルの再開
タイマーが終了すると、制御システムはバルブを閉じ、コンベヤーモーターを再始動します。充填されたボトルは先に進み、次の空のボトルが所定の位置に運ばれ、サイクルがシームレスに繰り返されます。
トレードオフの理解
原理は単純ですが、ボトル充填機の設計と構成には、その性能と特定のタスクへの適合性に影響を与える重要なトレードオフが存在します。
速度 対 精度
コンベヤー速度を上げ、充填時間を短縮すると、生産量は向上しますが、精度の代償を伴う場合があります。充填が速すぎると飛散や泡立ちの原因となり、タイミングのわずかな変動が充填量の不均一につながる可能性があります。
柔軟性 対 シンプルさ
単一のボトルサイズと形状向けに設計された機械は、シンプルで非常に効率的です。しかし、さまざまなボトルサイズに対応できる機械は柔軟性が高いものの、調整可能なガイドレールや交換部品など、より複雑なコンポーネントが必要となり、コストとセットアップ時間が増加します。
時間充填 対 容量充填
参照例では、シンプルで費用対効果の高い時間充填が使用されています。しかし、製品の流量や圧力が変化すると不正確になる可能性があります。より高度なシステムでは、時間だけに頼るのではなく、実際に分配される製品量を測定するため、容量充填または重量ベースの充填が使用され、優れた精度を実現します。
目標に合った適切な選択を行う
充填システムの選択または設計には、その原理を主要な運用目標と一致させる必要があります。
- 主な焦点が高容量、低コストの生産である場合: シンプルで専用の機械と時間充填が最も効率的なソリューションです。
- 主な焦点がさまざまな製品やボトルサイズの処理である場合: 調整が容易なコンポーネントとプログラム可能な制御を備えた柔軟なシステムを優先します。
- 主な焦点が精度と製品廃棄の最小化である場合: 容量充填または重量ベースの充填センサーを使用する機械は、単純な時間システムよりも優れています。
センシング、決定、作動というこのコアループを理解することが、自動化されたパッケージングシステムを評価し最適化するための鍵となります。
要約表:
| コンポーネント | 機能 | 主な特徴 |
|---|---|---|
| コンベヤーシステム | ボトルを搬送する | 安定したモーター駆動の移動 |
| センサーシステム | ボトルの位置を検出する | 光学式または近接トリガー |
| 充填システム | 製品を分配する | 正確なバルブとノズルの制御 |
| 制御システム (PLC) | シーケンスを管理する | 自動化のための事前プログラムされたロジック |
パッケージングラインの最適化の準備はできましたか? HONESTBEEは、商業養蜂場および養蜂機器販売業者向けに、堅牢で高性能な養蜂用品と機器を供給しています。カスタム機械用の信頼できるコンポーネントが必要な場合でも、高容量の蜂蜜充填用の効率的なシステムが必要な場合でも、当社の卸売中心の事業は、お客様のビジネスが依存する耐久性と精度を提供します。今すぐHONESTBEEにお問い合わせいただき、お客様固有のニーズについてご相談の上、運用効率を向上させましょう!
ビジュアルガイド
関連製品
- 空気圧ダブルノズルハニーフィリングボトリング包装機
- エコノミー小型ハニー充填機 ハニーボトル充填包装機
- 空気圧式ペースト充填機 ボトリング包装機 シングルノズル
- 半自動電動ボトルキャッピングマシン
- HONESTBEEによる半自動空気圧ボトルキャッピングマシン



















